Project Overview
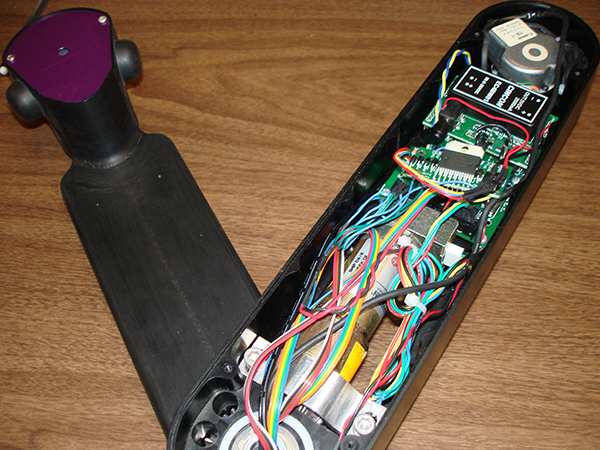
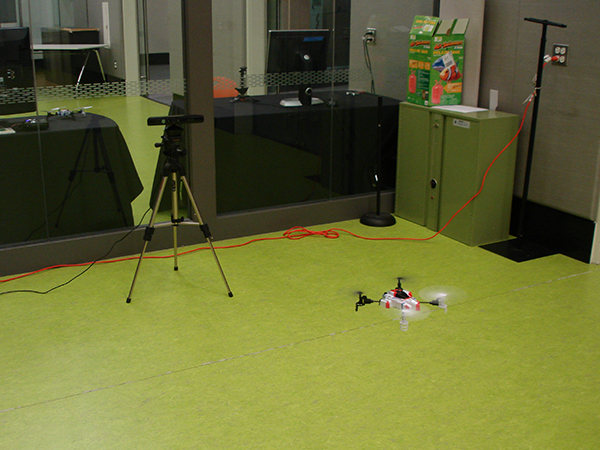
As part of a lab outreach effort, I developed a small quadrotor platform to display for the annual National Robotics Week event at Chicago's Museum of Science and Industry. The hardware for the quadrotor is a small remote control toy commercially available. To allow for custom control code, I replaced the control board with a custom PCB containing a PIC32 microcontroller, wireless chip, and motor drivers. The goal of the quadrotor was to hover autonomously as part of an exhibit station using feedback from a Microsoft Kinect.
![]() The PIC32 control code running on the quadrotor is available on Github: https://git.io/adwquad
The PIC32 control code running on the quadrotor is available on Github: https://git.io/adwquad
Hardware Details
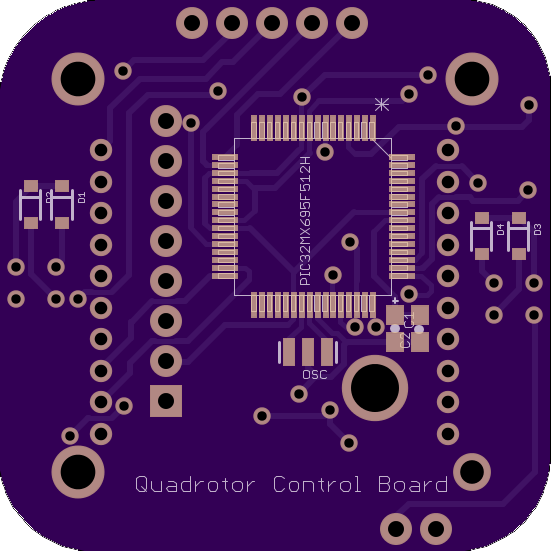
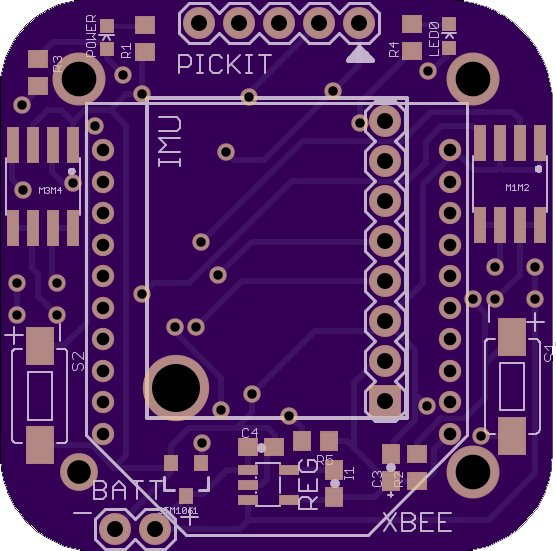 The quadrotor platform uses four simple brushed DC motors for the rotors. I chose to drive them with simple N-channel MOSFETs with a PWM signal. A pair of motors is run using a single 2-channel package. Wireless communication to a computer station is implemented using a XBEE wireless chip over a serial communication protocol. A PIC32 chip serves as the main controller on-board the quadrotor, receiving position feedback from the computer station connected to the Kinect. The loop rate on the Kinect feedback is 30Hz.
The quadrotor platform uses four simple brushed DC motors for the rotors. I chose to drive them with simple N-channel MOSFETs with a PWM signal. A pair of motors is run using a single 2-channel package. Wireless communication to a computer station is implemented using a XBEE wireless chip over a serial communication protocol. A PIC32 chip serves as the main controller on-board the quadrotor, receiving position feedback from the computer station connected to the Kinect. The loop rate on the Kinect feedback is 30Hz.
Controller Details
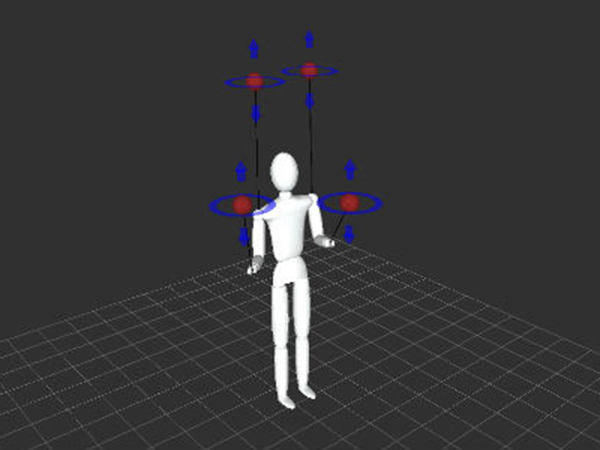
A simple LQR controller runs on the quadrotor itself from a reduced model representing the inertial properties of the quadrotor. On-board feedback is provided from a 6-axis gyro/accelerometer package using a complementarity filter for position control. For autonomous hover, absolute position feedback is necessary to prevent significant drift; therefore, the Kinect is used to provide that feedback. The Point Cloud Library (PCL) is used for data processing from the Kinect signal. A Euclidean cluster extraction algorithm is then used to extract the point cloud for the quadrotor and a centroid calculation is made to determine the quadrotor position.